
Den richtigen Elektromotor identifizieren
in nur 5 Schritten
Welchen Elektromotor brauche ich? In 5 Schritten zum richtigen Elektromotor.
Wenn Sie Ihren Elektromotor austauschen müssen, ist es oftmals erforderlich herauszufinden, welchen Elektromotor Sie als Ersatz benötigen. Wir wissen, dass es nicht immer einfach ist, den richtigen Ersatzmotor zu finden. Oft handelt es sich um ein älteres Modell, das nicht mehr hergestellt wird oder nicht mehr verfügbar ist.
In diesem Blog betrachten wir als Ausgangspunkt einen 3-Phasen-Motor, da dies der am häufigsten verwendete Elektromotor ist. In vielen Fällen können alle Informationen vom Typenschild am Motor abgelesen werden.
Fünf Schritte zur Auswahl des richtigen Elektromotors

Welchen Elektromotor brauche ich?
SCHRITT 1: Bestimmung der Nennleistung und Nennspannung
Die Nennleistung eines Elektromotors wird in Kilowatt (kW) angegeben. Bei älteren Motoren kann die Leistung auch in Pferdestärken (PS oder HP) angegeben werden.
Die Faustregel für die Umrechnung lautet: 1 PS = 0,75 kW.
Die Leistung eines Elektromotors basiert auf der maximalen Leistung.
In unserem Beispiel hat der Elektromotor eine Nennleistung von 1,5 kW (oder 2 PS).
Lesen Sie die Nennspannung gemäß Typenschild ab (zum Beispiel 230VD/400VY oder 400VD/690VY).
Wenn Sie in unserem ERIKS Webshop 1,5 kW und die Marke Fenner auswählen, sehen Sie alle verfügbaren Fenner®-Motoren mit einer Nennleistung von 1,5 kW. Achten Sie bitte darauf, die anderen Spezifikationen des Motors auszuwählen.
In den folgenden Schritten erklären wir worauf Sie achten müssen.
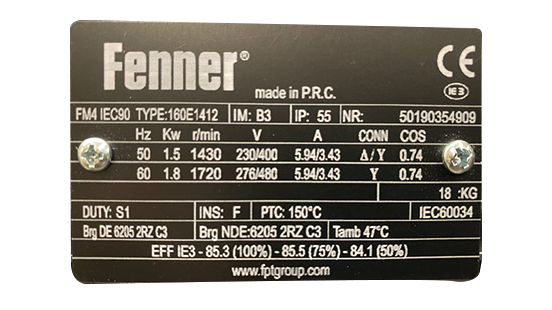
SCHRITT 2: Bestimmung der Drehzahl
Die Drehzahl ist in der Regel auf dem Typenschild angegeben. Dies ist die tatsächliche Drehzahl der Antriebswelle, ausgedrückt als „Umdrehungen pro Minute“. Hierbei handelt es sich um die Rotationsgeschwindigkeit der Antriebswelle und wird häufig in „revolutions per minute“ bzw. „rpm“ ausgedrückt. Eine andere Möglichkeit der Darstellung ist die Notation der Anzahl der „Pole“: ein 2-poliger Motor hat 3000 rpm. Bei 4 Polen sind es 1500 rpm, bei einem Motor mit 6 Polen sind es 1000 rpm etc.
Aus technischen Gründen weicht die tatsächliche Geschwindigkeit der Welle immer etwas ab und liegt unter den genannten Zahlen. Achten Sie also immer darauf, korrekt aufzurunden. Eine gute Faustregel lautet: Motorgeschwindigkeit = 6000 geteilt durch die Anzahl der Pole. Ein 4-poliger Motor läuft also mit 6000/4 = 1500 rpm.
SCHRITT 3: Bauform des Elektromotors
Ein Elektromotor kann auf mehrere Arten montiert werden. Dies ist beispielsweise nur mit einem Fuß, einem Flansch oder einer Kombination daraus möglich. Die Bauform (oder die Montageart) wird durch einen Code der europäischen Norm IEC 34-7 angegeben
Es gibt fünf grundlegende Montagearten für Elektromotoren:
- B3: Montage mittels eines Fußes
- B5: Montage mittels eines Flansches (Durchmesser des Flansches ist größer als das Motorgehäuse)
- B14: Montage mittels eines Flansches (Durchmesser des Flansches ist kleiner als das Motorgehäuse)
- B35: Montage mittels eines Fußes + Flansch (Kombi aus B3 und B5)
- B34: Montage mittels eines Fußes + Flansch (Kombi aus B3 und B14)
Der Elektromotor im Beispiel hat die Bauform B14. Dieser Motor ist daran zu erkennen, dass in den Schraubenlöchern des Flansches ein Gewinde vorhanden ist. Hierbei handelt es sich um Sacklöcher. Bei einem B5-Flansch handelt es sich um Durchgangsbohrungen ohne Gewinde.
SCHRITT 4: Auswahl der richtigen Effizienzklasse
Ab dem 16. Juni 2011 müssen fast alle auf dem Markt befindlichen Motoren gemäß der IE-Richtlinie gekennzeichnet und in eine Effizienzklasse eingestuft werden.
Die Effizienzklassen für Elektromotoren sind:
- IE1 = Standardeffizienz (früher EFF2)
- IE2 = Hohe Effizienz (früher EFF1)
- IE3 = Premium-Effizienz
- IE4 = Super-Premium-Effizienz
Seit dem 01. Januar 2017 müssen alle neuen Elektromotoren mit einer Leistung von 0,75 kW und mehr der IE3-Norm entsprechen. Es gibt jedoch ein paar Ausnahmen von dieser Richtlinie.
SCHRITT 5: Bestimmung der Baugröße
Die Baugröße des Elektromotors ist eine weitere wichtige Eigenschaft. Da die Maße für den europäischen Markt in der IEC-Norm festgelegt sind, sind Elektromotoren verschiedener Marken häufig austauschbar. Die meisten Hersteller verwenden für eine bestimmte Baugröße die gleichen Abmessungen.
Die wichtigsten Maße nach der IEC-Norm sind:
- A (Bohrungsabstand, Vorderansicht)
- B (Bohrungsabstand, Seitenansicht)
- C (Wellenschulter bis zum ersten Befestigungsloch)
- D (Durchmesser der Antriebswelle am Wellenende D.E.)
- E (Wellenlänge)
- H (Achsenhöhe)
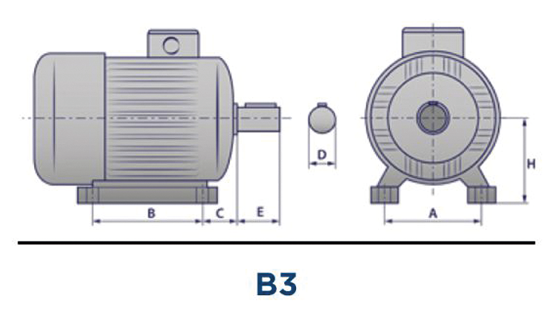
Bei einen genormten Elektromotor nach IEC-Norm, beziehen sich diese Maße hierauf. Wenn wir zum Beispiel über die Baugröße eines Motors sprechen, meinen wir immer das H-Maß. Dies ist die Wellenhöhe eines Elektromotors mit Fußmontage (B3).
Bei Elektromotoren, die der IEC-Norm entsprechen, hängen die meisten Maße von der genannten Baugröße bzw. Achsenhöhe des Motors ab. Dabei handelt es sich um den Abstand des Antriebswellenzentrums von der mittleren Fußunterseite eines B3-Motors. In der folgenden Zeichnung mit dem Buchstaben „H“ bezeichnet.

Bitte bedenken Sie auch Sonderausführungen wie erhöhte Schutzarten, Betriebsarten, Sonderwicklungen, Rollenlager und weitere Modifikationen.
Informationen anfordern
Wünschen Sie weitere Informationen zur Auswahl des richtigen Elektromotors? Tragen Sie Ihre Daten in das untenstehende Formular ein und einer unserer Spezialisten wird sich mit Ihnen in Verbindung setzen.
Weitere Artikel
Der richtige Elektromotor?
Hoffentlich finden Sie mit diesen 5 Schritten schnell den richtigen Elektromotor in unserem Webshop. Haben Sie noch Fragen? Dann setzen Sie sich mit unseren Elektromotor-Spezialisten in Verbindung, um eine passende Beratung zu erhalten. Wir sind für Sie da!
Kontakt
ERIKS Deutschland GmbH
Kreisheide 7
D-33790 Halle (Westf.)
Telefon: +49 (0) 32 222 007-000
Kontaktformular
Bei Fragen zu unseren Produkten und Leistungen nutzen Sie unser Kontaktformular.
ERIKS Standorte weltweit
Nutzen Sie unseren Standortfinder, um den nächstgelegenen ERIKS Standort mit dem benötigten Know-how zu finden.
